|
RobotLib
1
A set of software wrappers for Rovio, Roomba and NXT robots written in C#.
|
|
RobotLib
1
A set of software wrappers for Rovio, Roomba and NXT robots written in C#.
|
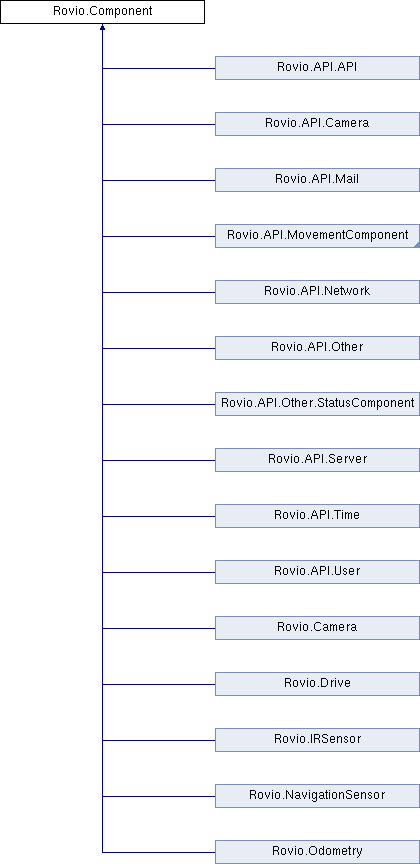
Interface for different convenience classes that require access to the Robot class. More...
Public Member Functions | |
| Component (Robot _robot) | |
| The constructor. | |
| virtual void | Update () |
| The Update function that manually refreshes the state of a given component (e.g. when AutoUpdate = false) | |
Public Attributes | |
| bool | AutoUpdate = true |
| Automatic update option for methods requesting more than one piece of information. | |
Protected Attributes | |
| Robot | robot |
| The robot class, accessible by all dervied classes. | |
Interface for different convenience classes that require access to the Robot class.
| Rovio.Component.Component | ( | Robot | _robot | ) |
The constructor.
|
virtual |
The Update function that manually refreshes the state of a given component (e.g. when AutoUpdate = false)
Reimplemented in Rovio.NavigationSensor, Rovio.IRSensor, Rovio.Odometry, Rovio.Camera, Rovio.API.Other.StatusComponent, Rovio.API.Movement.MCUReportComponent, Rovio.API.Movement.TuningParametersComponent, and Rovio.API.Movement.ReportComponent.
| bool Rovio.Component.AutoUpdate = true |
Automatic update option for methods requesting more than one piece of information.
|
protected |
The robot class, accessible by all dervied classes.
 1.8.2
1.8.2

